Success Cases
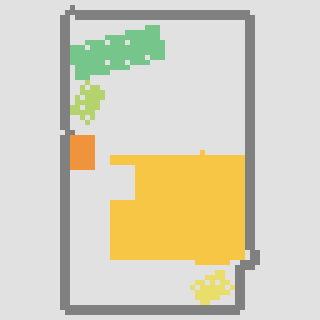
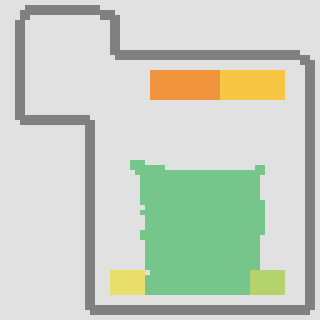
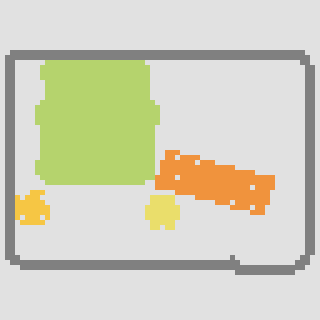
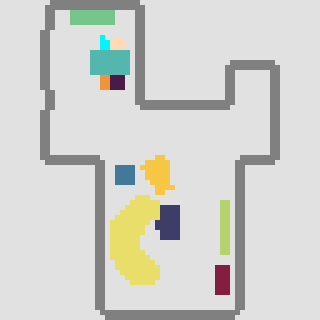
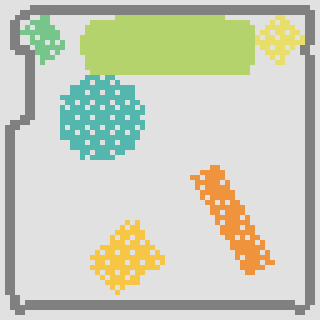
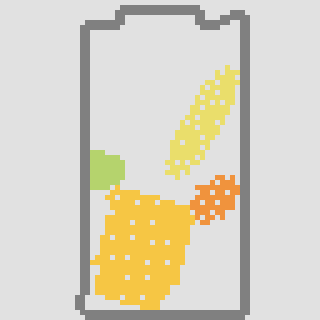
Initial layout
Action Sequence
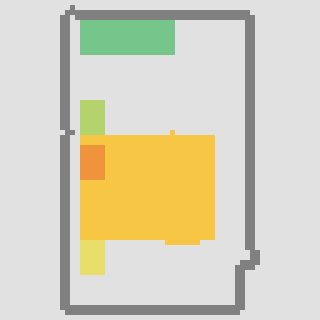
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
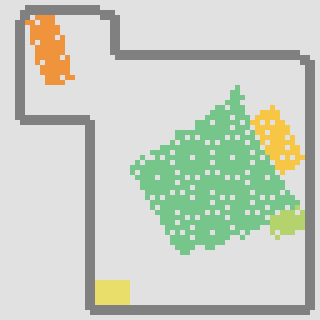
Failure Cases
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout
Initial layout
Action Sequence
Target layout

Initial layout

Action Sequence
Target layout

Dataset

We curate a new large-scale dataset containing 13k layout pairs for benchmarking SRP.
Citation
@inproceedings{wang2024mastering,
title={Mastering Scene Rearrangement with Expert-assisted Curriculum Learning and Adaptive Trade-Off Tree-Search},
author={Wang, Zan and Wang, Hanqing and Liang, Wei},
booktitle={International Conference on Intelligent Robots and Systems (IROS)},
year={2024}
}